Programme of the NITROS International Workshop on Engineering for Rotorcraft Safety
Virtual Workshop 7-9 April 2021
To download a PDF version of the programme click here
Clicking on titles you will be able to download the extended abstracts
Day 1, April 7, 2021, Morning Chairman Pierangelo Masarati
09:30 Giuseppe Quaranta, Politecnico di Milano
“Introduction to the NITROS Workshop on Engineering for Rotorcraft Safety”
09:40 Fabio Nannoni, Senior Vice President Safety System Governance Leonardo
“Welcome to the participants by Leonardo Helicopter Division”
09:45 Pierluigi Parente, Leonardo Helicopter Division
“PBN for RC operations: improved safety and unparalleled operational flexibility”
10:30 Open discussion
10:50 Coffee break
11:15 D. Tilloca, Politecnico di Torino
“Hazard and risk analysis for helicopter aerial work mission profiles”
11:45 D. Friesen, TU Delft and Politecnico di Milano
“Design and evaluation of a constraint-based helicopter display to support safe path planning”
12:15 P. Masarati, Politecnico di Milano
“Helicopter emergency medical services (HEMS): higher availability calls for more stringent safety
Day 1, April 7, 2021, Afternoon Chairman Giuseppe Quaranta
14:00 P. Scaramuzzino, TU Delft and Politecnico di Milano
“Autorotation transfer of training: effects of helicopter dynamics variation”
14:30 M. Favale, Leonardo Helicopter Division
“Virtual sensors for prediction and monitoring”
15:00 Coffee break
15:30 N. Nabi, Politecnico di Milano and TU Delft
“Load alleviation in tiltrotor aircraft through incremental nonlinear control allocation”
16:00 F. Marino, Robby Moto Engineering
16:30 Wrap up
16:45 End of day 1
Day 2, April 8, 2021, Morning Chairman Marilena Pavel
09:30 G. Padfield, Emeritus Professor University of Liverpool
“The potential impact of critical aircraft pilot couplings on the safety of tilt-rotor operations”
10:15 Open discussion
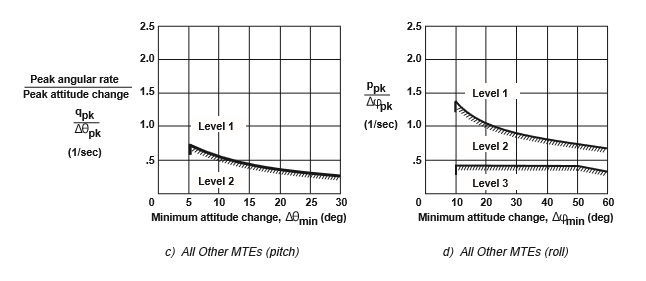
10:30 A. Cocco, Politecnico di Milano
“Effect of control inceptors dynamics on helicopter vertical bounce proneness”
11:00 Y. Yu, Tu Delft and Politecnico di Milano
“Analysis of rotorcraft pilot couplings from the perspective of RPC detection: a new multi-axes
11:30 Coffee break
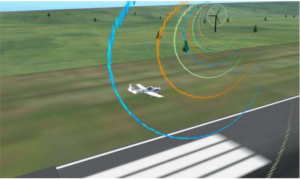
11:45 M. Jump, University of Liverpool
“Preliminary piloted flight-simulation evaluation of autogiro operations in the presence of wind-
12:15 S. Henriquez Huecas, University of Liverpool and University of Glasgow
“Helicopter handling analysis using a synthetic eddy turbulence model”
12:45 Lunch break
Day 2, April 8, 2021, Afternoon Chairman Mark White
14:00 R. Bianco-Mengotti, Leonardo Helicopter Division
“The advantages of virtual engineering in rotorcraft flight mechanics design process”
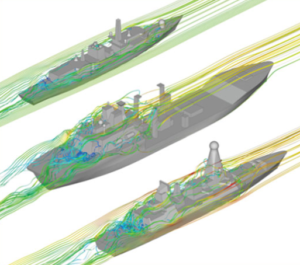
14:30 N. Taymourtash, Politecnico di Milano and University of Glasgow
“Aerodynamic load assessment of model-scale helicopter in shipboard operation”
15:00 Coffee break
15:30 S. Fasiello, Politecnico di Milano and University of Liverpool
“The effect of turbulence on RPC incipience and workload”
16:00 Wrap-up
16:15 End of day 2
Day 3, April 9, 2021, Morning Chairman George Barakos
09:30 C. Audard, EASA Safety coordinator – VTOL
“Rotorcraft safety roadmap and regulatory perspective on design safety improvements”
10:15 Open Discussion
10:30 F. Fonte, Leonardo Helicopter Division
“AW609 whirl flutter simulation, model validation and flight test for aeroelastic stability
certification”
11:00 S. Ghiasvand, Politecnico di Milano and University of Liverpool
“Experimental and numerical investigation of matrix cracking and delamination interaction of
curved composite laminates by FBG sensors”
11:30 Coffee break
11:45 M. Filippi, Politecnico di Torino
“Multi-dimensional FE models for multifield analyses of composite realistic helicopter blade”
12:15 C. Paciello, Step Sud Mare S.r.l
“Crashworthiness of a tiltrotor fuel tank bay”
12:45 Lunch break
Day 3, April 9, 2021, Afternoon Chairman Giuseppe Quaranta
14:00 Francesco De Domenico, Leonardo Helicopter Division
“Rotorcraft ice protection in LHD”
14:30 M. Morelli, Politecnico di Milano and University of Glasgow
“High-fidelity numerical ice prediction on rotors”
15:00 Coffee break
15:30 F. Di Caprio, CIRA
“Numerical evaluation of the damage scenario due to a bird strike on the wing leading edge of a
16:00 F. Rovere, University of Glasgow and Politecnico di Milano
“Brown-out simulations of model-rotors”
16:30 Wrap-up
16:45 End of day 3